
Battery-powered motor drives are central to today’s electrification efforts, spanning applications from micromobility and power tools to industrial equipment and off-highway vehicles. As power levels increase and battery voltages move beyond legacy 48V architectures, designers are under pressure to deliver higher torque, higher power density, and longer operating life—often within tight cost and space constraints.
In these systems, reliability is rarely determined by steady-state efficiency alone. Instead, long-term performance is defined by how well power devices tolerate transient stress, fault conditions, and repeated overload events.
Motor Drives Operate at the Edge
Unlike line-powered systems, battery-powered motor drives must extract high peak power from limited voltage rails. Startup, acceleration, regenerative braking, and stall events drive current sharply upward—and these conditions are part of normal operation, not rare corner cases.
In practice, inverter stages experience rapid current transients, high di/dt switching, and aggressive thermal cycling inside compact or sealed enclosures. The battery interface adds further stress, as inrush currents and external short-circuit faults can force discharge MOSFETs to endure extreme electrical stress for tens of microseconds before protection circuitry can respond.
Across applications ranging from a few hundred watts to tens or hundreds of kilowatts, motor drives routinely operate near the practical limits of their power devices.
Why MOSFET Robustness Matters More Than Ever
Motor drive failures rarely occur during nominal operation. They tend to happen during transitions: startup into a locked rotor, abrupt load changes, shoot-through events, wiring faults, or regenerative braking. In these moments, MOSFETs may be required to block high voltage or carry very high current.
This makes robustness-related parameters such as safe operating area (SOA) and short-circuit withstand capability (SCWC) critical design metrics. A MOSFET with excellent headline RDS(on) can still fail catastrophically if its usable operating margin collapses under real-world stress.
For many motor drive designs, survivability during abnormal conditions ultimately defines reliability, uptime, and warranty exposure.
Robustness Built into the Silicon
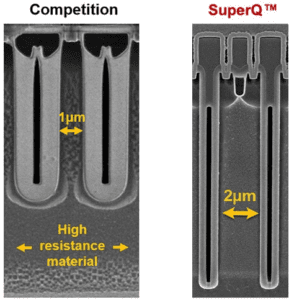
MOSFET robustness is fundamentally linked to silicon architecture. SuperQ® MOSFETs employ a fully charge-balanced trench structure that
preserves a wider current conduction path than approaches that aggressively shrink feature sizes to minimize resistance.
By maintaining charge balance without concentrating current into narrow conduction regions, these devices achieve low on-resistance while avoiding excessive current density within localized areas of the silicon. Wider mesa regions and optimized trench geometry promote more uniform current distribution, reducing localized heating and improving tolerance to high peak current and fault-induced electrical stress.
This architectural approach allows robustness to be built into the device itself, rather than relying solely on system-level mitigation.
Short-Circuit Withstand Capability Under Real Conditions
Short-circuit events are among the most destructive failure modes in battery-powered motor drives. During shoot-through or external battery faults, current can rise to extreme levels within microseconds. The MOSFET must remain electrically stable long enough for detection and protection mechanisms to act.
To evaluate real-world behavior, SuperQ® MOSFETs have been characterized using controlled short-circuit testing that drives devices to failure rather than relying solely on static ratings. In comparative testing of 150V TOLL-packaged devices, a SuperQ® MOSFET with a typical on-resistance of 2.5mΩ sustained peak short-circuit currents of current of 641A, compared to 612A for a competing device with similar ratings, representing a 29A improvement in short-circuit withstand capability. At the system level, this additional margin translates into longer fault-detection windows, more tolerant protection timing, and reduced risk of catastrophic inverter failure.
Simpler Motor Drive Architectures
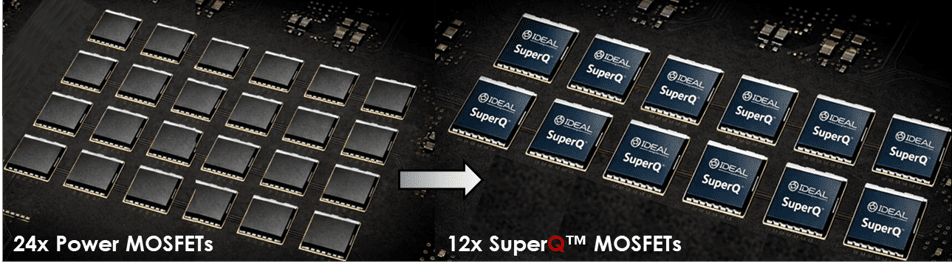
Conventional motor drive designs often compensate for limited device robustness by paralleling large numbers of MOSFETs. While effective, this increases BOM cost, PCB area, gate-drive complexity, and sensitivity to layout parasitics.
With higher device-level robustness, designers can often reduce the number of parallel MOSFETs required while maintaining, or improving, overall reliability. In practical designs, this can mean replacing four or five conventional MOSFETs with two or three higher-robustness devices, simplifying gate-drive routing and reducing component count without sacrificing efficiency.
Designed for Real-World Motor Drive Behavior
Battery-powered motor drives do not operate at a single steady-state point. They live in transitions, transients, and fault conditions. Designing for these realities requires power devices that deliver more than low resistance, it requires genuine electrical and thermal margin.
By embedding robustness at the silicon level and enabling simpler system architectures, modern MOSFET technologies allow designers to build motor drives that perform reliably under real operating conditions—where it matters most.
Designing a motor drive for real-world stress?
Explore how SuperQ® MOSFETs are used in high-current battery inverters, battery disconnects, and protection circuits. Explore Motor Drive Solutions